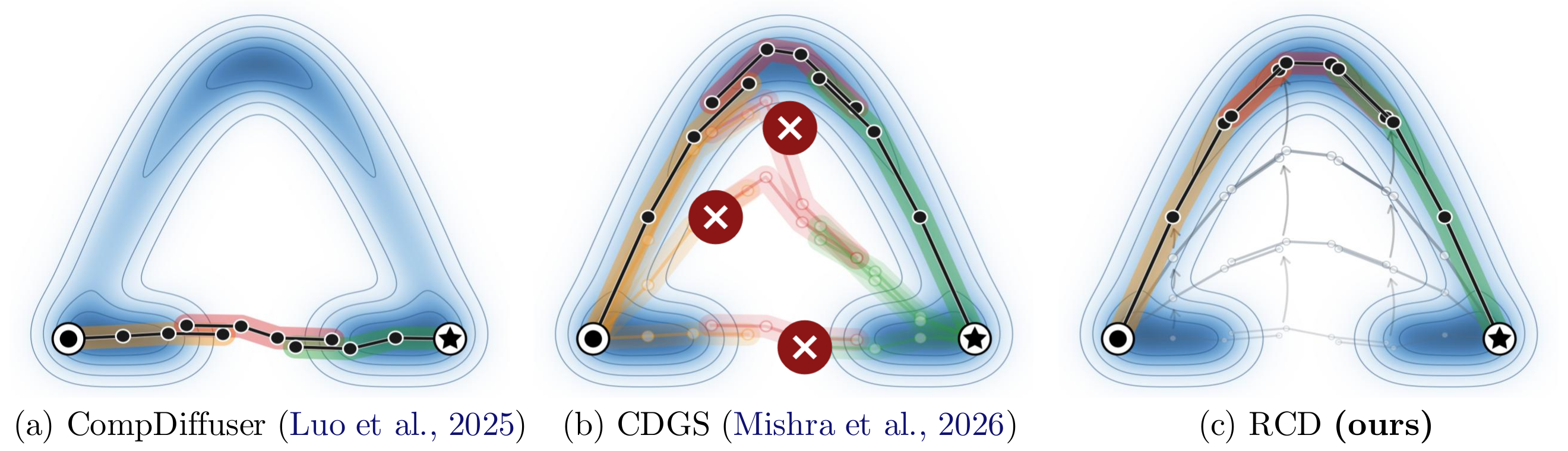
Motivation: The Mode-Averaging Problem
We visualize the entire denoising process on
AntMaze-Giant-Stitch: starting from pure noise, both
methods iteratively refine multiple overlapping local plans into a
single composed trajectory from start
 to goal
to goal
 .
Each task panel shows 20 sampled plans for the corresponding
test-time task. Plans that violate environment constraints
(wall penetration) are coloured
red; feasible plans are coloured
green. CompDiffuser frequently produces
mode-averaged trajectories in low-density regions, leaving plans
that cut through walls, while RCD steers
each denoising step toward high-density modes and recovers globally
coherent paths.
.
Each task panel shows 20 sampled plans for the corresponding
test-time task. Plans that violate environment constraints
(wall penetration) are coloured
red; feasible plans are coloured
green. CompDiffuser frequently produces
mode-averaged trajectories in low-density regions, leaving plans
that cut through walls, while RCD steers
each denoising step toward high-density modes and recovers globally
coherent paths.